


Eloignons un moment, les habitudes pour nous intéresser à la robotique, par l'intermédiaire de ce bras manipulateur pédagogique: "Le robot youpi"

Fabriqué et commercialisé par "JD Productique" à Vanves (92) dans les années 1985, à destination de l'enseignement technique, sa petite bouille, vous rappellera peut être des souvenirs de collèges, de cours de technologie, heures d'initiations à l'informatique et découvertes de la robotique.
De conception élémentaire, nous trouvons là, une véritable structure robuste et précise, un bras manipulateur rappelant le déploiement humain à l'exception d'une pince, remplaçant nos doigts communs.
Le système est à 5 degrés de liberté, indépendants, à savoir une base, épaule, coude, poignet, rotation main et pince. Un véritable humain, je vous dis !!
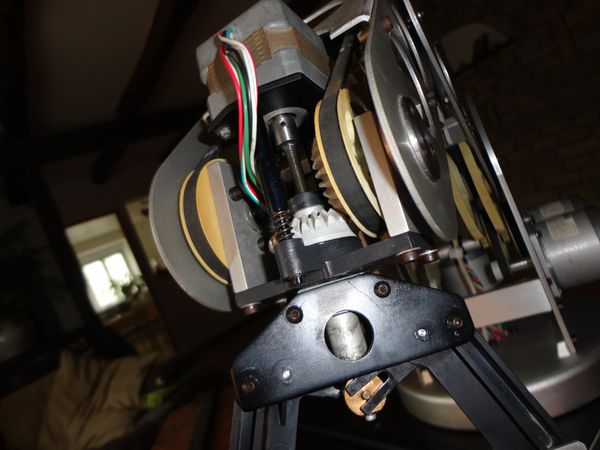
Structure ouverte permettant l'observation de marche et des principes de transmission, les actions sont réalisées par des moteurs pas à pas (qualité industrielle Crouzet) sur renvois de pignons et courroies crantées.
La logique démultipliée annonce une précision de 0,1mm, permettant une charge transportée de 400g à vitesse maximale soit 40°/seconde ce qui n'est pas rien...

On pourrait douter de la robustesse de ces articulations mais, toute la réflexion est basée sur une logique industrielle avec, une base sur roulements à rouleaux, mouvements sur bagues bronze et axes en inox, tendeurs sur chaque courroie et, une structure bien pensée.
Pour avoir entièrement démonté, nettoyé, huilé et regraissé celui-ci, j'ai agréablement était surpris par la qualité de fabrication !!

La pince bidigitale permettant de saisir un objet de plus de 80mm de diamètre possède, une compensation à ressorts de façon à contrôler et permettre, un effort de serrage important.
L'ouverture et la fermeture sont également assurées par un moteur pas à pas embarqué.
A l'origine contrôlé informatiquement par un micro-ordinateur de marque Thomson, type M05 ou T07/70, devenu difficile à se procurer et contraignant, on trouve aujourd'hui sur la toile, outres des émulateurs, de merveilleux logiciels de commandes destiné à ce robot avec fonction de pilotage manuel simple et automatique par apprentissage et répétition de commandes.
Bien que toute la partie de commande, s’effectue en signaux simple, via une sortie classique imprimante à 25 conducteurs de type « LPT », il vous faudra en revanche, réaliser un câble de transmission spécifique (détails et liens en fin d’article.)

Evolutif, la carte de commande permet la gestion d’entrées/sorties tels que, des capteurs extérieurs mais surtout, l'ensemble peut être équipé d'une série de détecteurs optiques optionnels, en lecture directe sur les pignons de démultiplication pour faire office d'utiles capteurs de position de référence sur tous les axes de mouvements.
Ma version n’en est pas équipée mais les pignons possèdent néanmoins leurs repères, la structure est également pré-percée.

Les trajectoires se réalisent par pilotage direct des axes ou de façon automatique, par une segmentation de mouvements et une fonction mémoire.
Il devient très simple d'ordonner la prise et le déplacement d'objet, sur des distances depassant de loin la base voir même des quasi-retournements d'axes donnés par d'importants débattements.


Liens exterieurs:
Emulation pour pilotage Thomson, réalisation de cables de commande.
http://www.clg-vignaud-morangis.ac-versailles.fr/spip/spip.php?article243
Côté moderne, logiciel de pilotage tout poste, re-compilé de toutes pièces.


